Bloque 3.
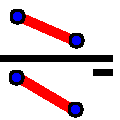 |
Segmento AB.
Calcula las proyecciones del segmento definido por los puntos A y B.
Sobre la línea de tierra traza los segmentos A1B1 y A2B2.
En axonométrico calcula la proyección directa, horizontal y vertical del segmento, así como las de los puntos A y B (estas últimas se representan con puntos de tamaño 1)
Datos a introducir:
|
 |
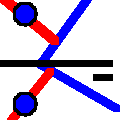
Trazas recta AB.
Representa los puntos traza de la recta que pasa por A y B.
Traza horizontal: círculo vacío.
Traza vertical: círculo relleno.
Se calculan tanto en diédrico como en axonométrico.
Datos a introducir:
|
 |
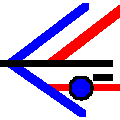
Recta horizontal por P_1
Dado un plano y la proyección horizontal de un punto de dicho plano, calcula las proyecciones de la recta horizontal (paralela al plano horizontal) contenida en ese plano que pasa por P. Además, calcula la proyección vertical de P y sus tres proyecciones axonométricas. Datos a introducir: 1. P1 (proyección horizontal de P) 2. A es un punto de la traza horizontal del plano. 3. V es el vértice que forman las trazas en la línea de tierra. 4. B punto de la traza vertical del plano. 5. O (origen de los ejes axonométricos) |
 |
Recta frontal por P_1
Dado un plano y la proyección horizontal de un punto de dicho plano, calcula las proyecciones de la recta frontal (paralela al plano vertical) contenida en ese plano que pasa por P. Además, calcula la proyección vertical de P y sus tres proyecciones axonométricas.
Datos a introducir:
|
 |
Perpendicular por P de un plano.
Traza un segmento perpendicular a un plano por un punto P de él. También calcula la proyección vertical de P y sus tres proyecciones axonométricas, así como las del otro extremo del segmento.
Datos a introducir:
|
 |
Perpendicular a un plano desde P exterior.
Dado un punto por sus dos proyecciones diédricas, traza el segmento perpendicular al plano desde ese punto hasta la intersección.
Datos a introducir:
|
 |
Giro segmento AB hasta frontal.
Partiendo de los extremos de un segmento, se gira hasta dejarlo frontal (proyección vertical en verdadera magnitud).
Se utiliza como eje de giro la recta vertical que pasa por el primer punto que se inserte como dato.
El resultado son las proyecciones diédricas y axonométricas del segmento y del extremo B.
Datos a introducir:
|